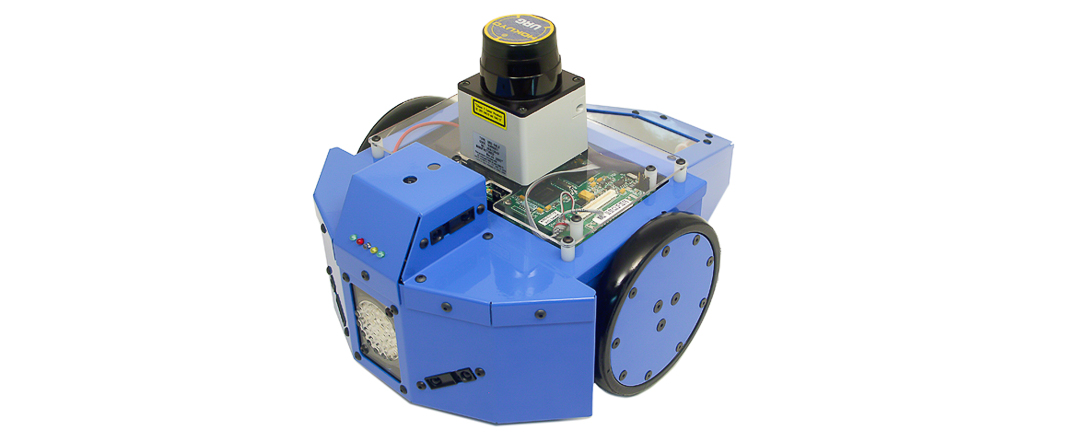
Acroname's experience with autonomous systems over almost a decade, countless customer interactions and innovative technologies led to the development of Garcia (Dead reckoning, get it?) . No corners were cut during the design as new components were developed when an optimal solution was not readily available. Efforts ranged from designing custom motors, high efficiency motor-driver circuitry, custom wheel molds, panel inserts, metal fabrication and a closed loop motor controller design built on BrainStem technology.
The Garcia design and development included:
- 3D mechanical design
- Printed circuit board (PCB) fabrication
- Embedded firmware development
- Software support (configuration utilities, APIs)
Garcia became a hallmark of university robotics courses. These systems are still in active use today, introducing robotic control systems, motion planning methodologies and environmental mapping to students. Special add-ons and accessories were developed, including a camera boom for CMU and CPU expansion boards. Being based on BrainStem technology, Garcia is remarkably adaptable and extensible as a learning, demonstration and research platform.
GARCIA SOFTWARE
Garcia is no longer actively maintained or being built. A legacy software package is available for existing users, please contact us if you need a copy for your Garcia.