More control than just on and off
Enable and disable VBus, all Data, High Speed or Super Speed connections
In addition to turning ports on and off, the USBHub3+ can also independently enable and disable Voltage and Data:
In addition to turning ports on and off, the USBHub3+ can also independently enable and disable Voltage and Data:

One common task in designing and building automation systems is logic circuitry interfacing to high power loads. Read article.

An example of converting the non-linear voltage output of a Sharp analog infrared range finder into a usable distance measurement using only integer math. Read article.

Comparison of effective ranges, sensitivity and angle of view for Sharp infrared (IR) ranger and range finders. Theory of operation of infrared range finders. Read article.
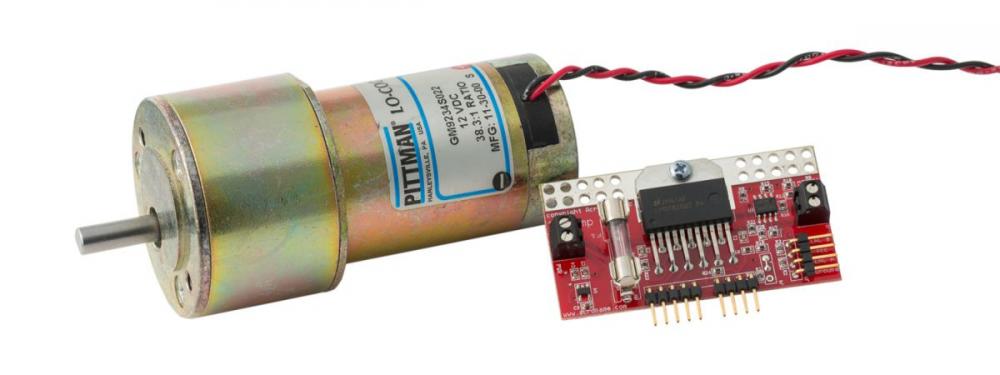
An article describing the use of voltage generated by a spinning motor to conclude the speed of the motor's rotation. Read Article.
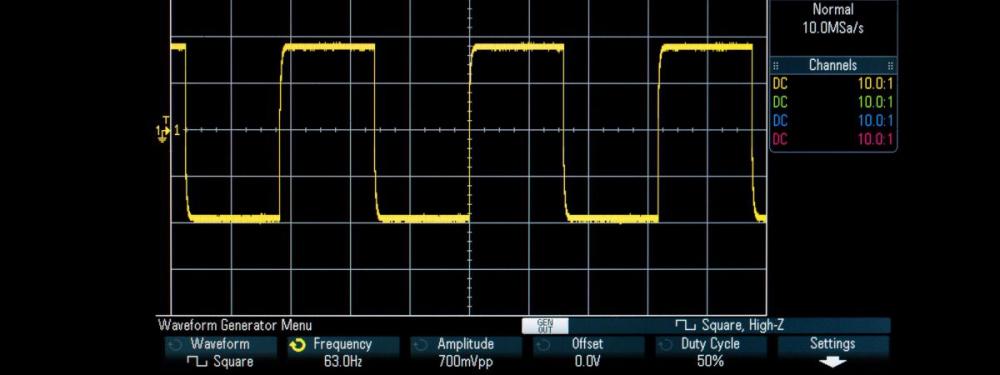
PWM (Pulse Width Modulation) refers to the concept of rapidly pulsing a digital signal on a wire. Amongst many other uses, it can be used to simulate a varying static voltage. PWM is commonly used for driving motors, heaters, LEDs or lights in varying intensities or speeds. Read Article

Acroname tests the UTM-30LX-EW, UST-10LX, and the URG-04LX-UG01 both indoors and out comparing their capabilities, strengths and weaknesses. Read Article.